Stair Climbing Robot
Intro
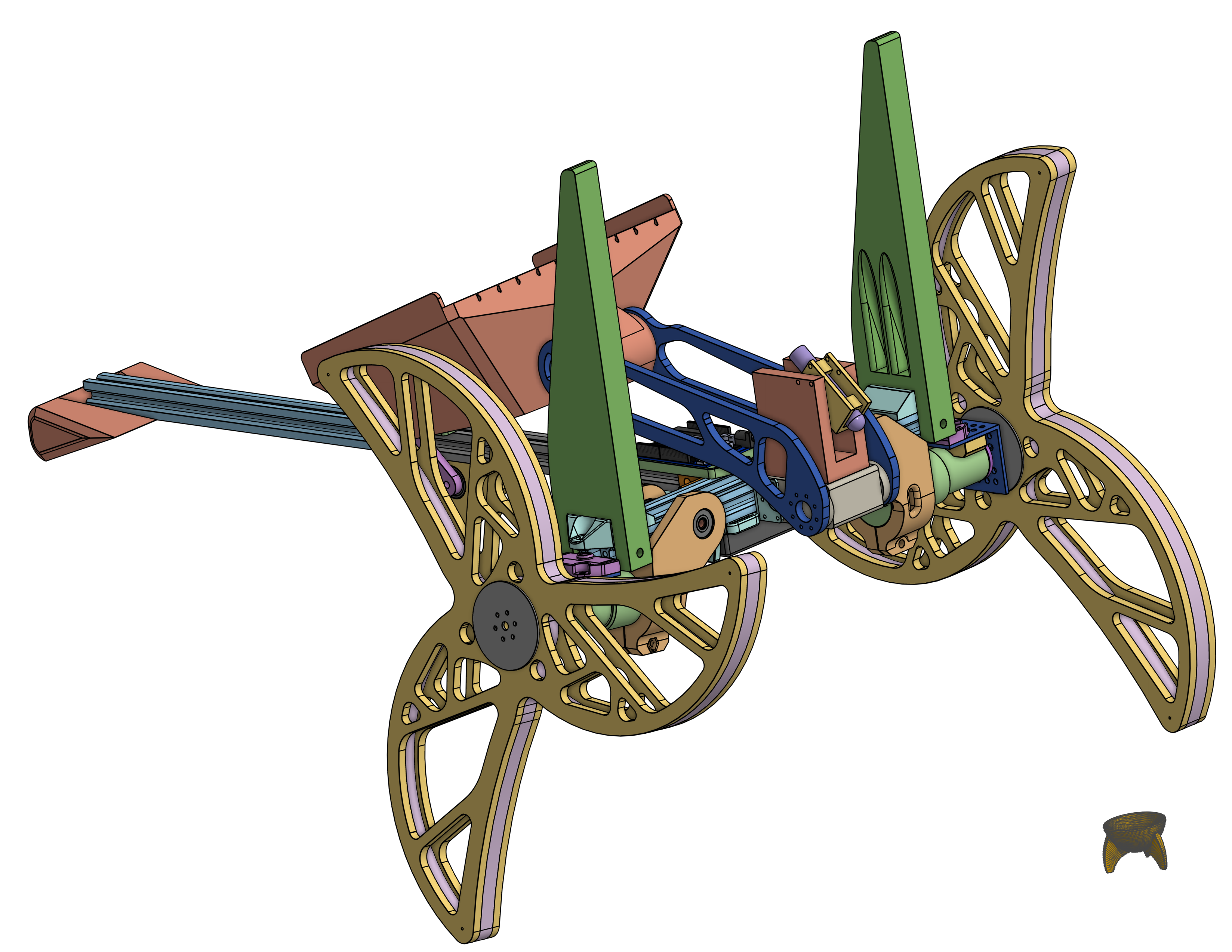
For my sophomore design class, I worked with a small team to compete in a class-wide competition. Our goal was to design and build a robot capable of climbing a set of stairs, retrieving an egg, and returning it safely to the start. As the lead for the robot's mechanical design, I managed the CAD, manufactured prototypes, and integrated the components.
Wheels

Our tri-spoke wheel design proved exceptionally effective at climbing the stairs. However, the long spokes were susceptible to bending loads if the robot tipped over. To ensure robustness, I designed the wheels as a sandwich composite with birch plywood skins and a PETG core. We tested the bending strength of several core infill densities and adhesives, finding that a 15% infill core bonded with cyanoacrylate created the strongest construction. I also used topology optimization in Fusion 360 to reduce unnecessary mass from the plywood skins.
Suspension
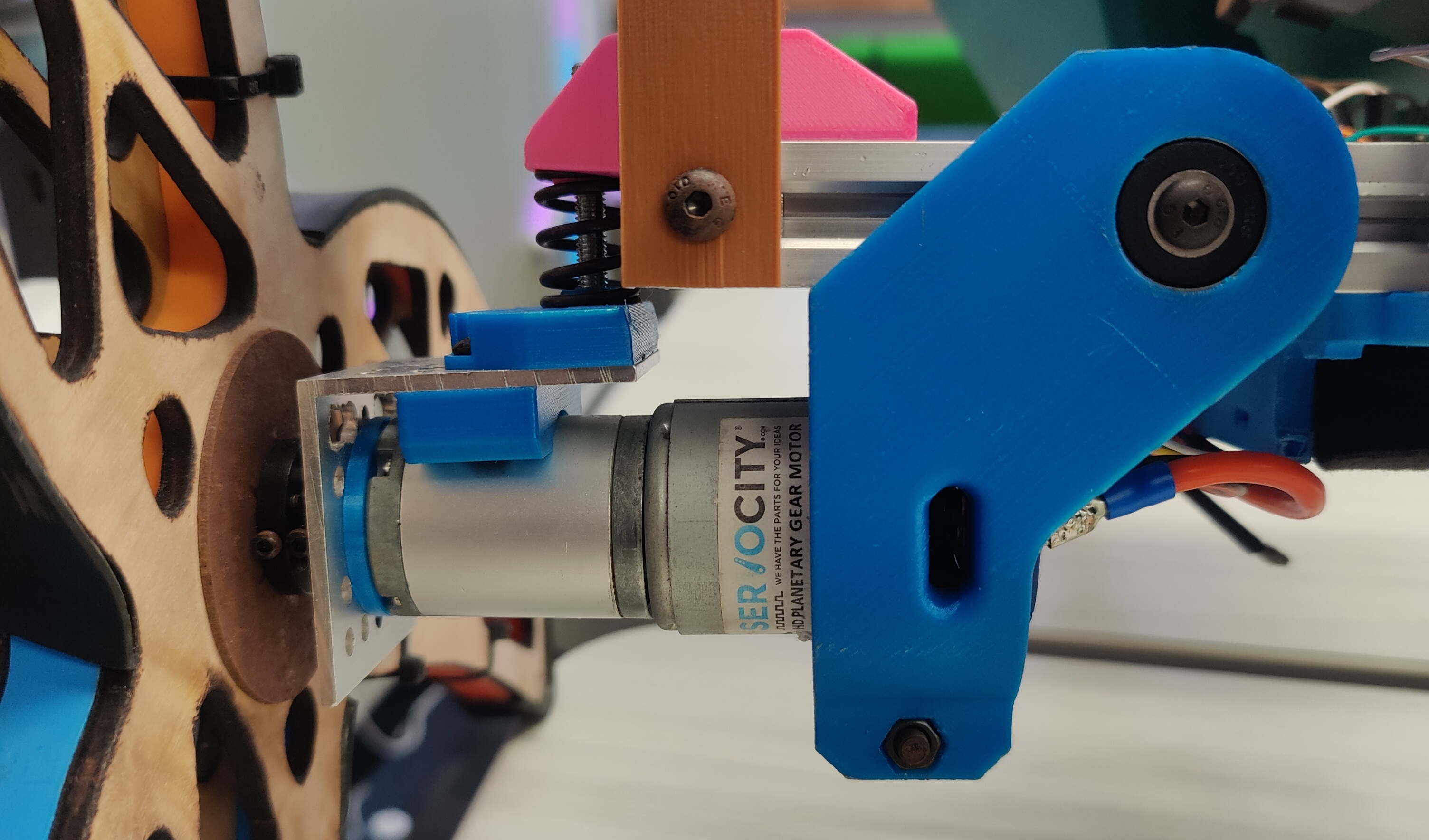
To complement the robust wheels, I implemented a suspension system to absorb major impacts. To manage impact loads, I repurposed a pair of Kawasaki Z125 motorcycle clutch springs. By calculating the total strain energy capacity of the spring pair, I verified they could effectively dissipate the kinetic energy from a 1-meter free-fall drop without bottoming out. For simplicity, I used a swing-axle design with 608 bearings as pivots and integrated the motor housing as a structural component.
Egg Basket
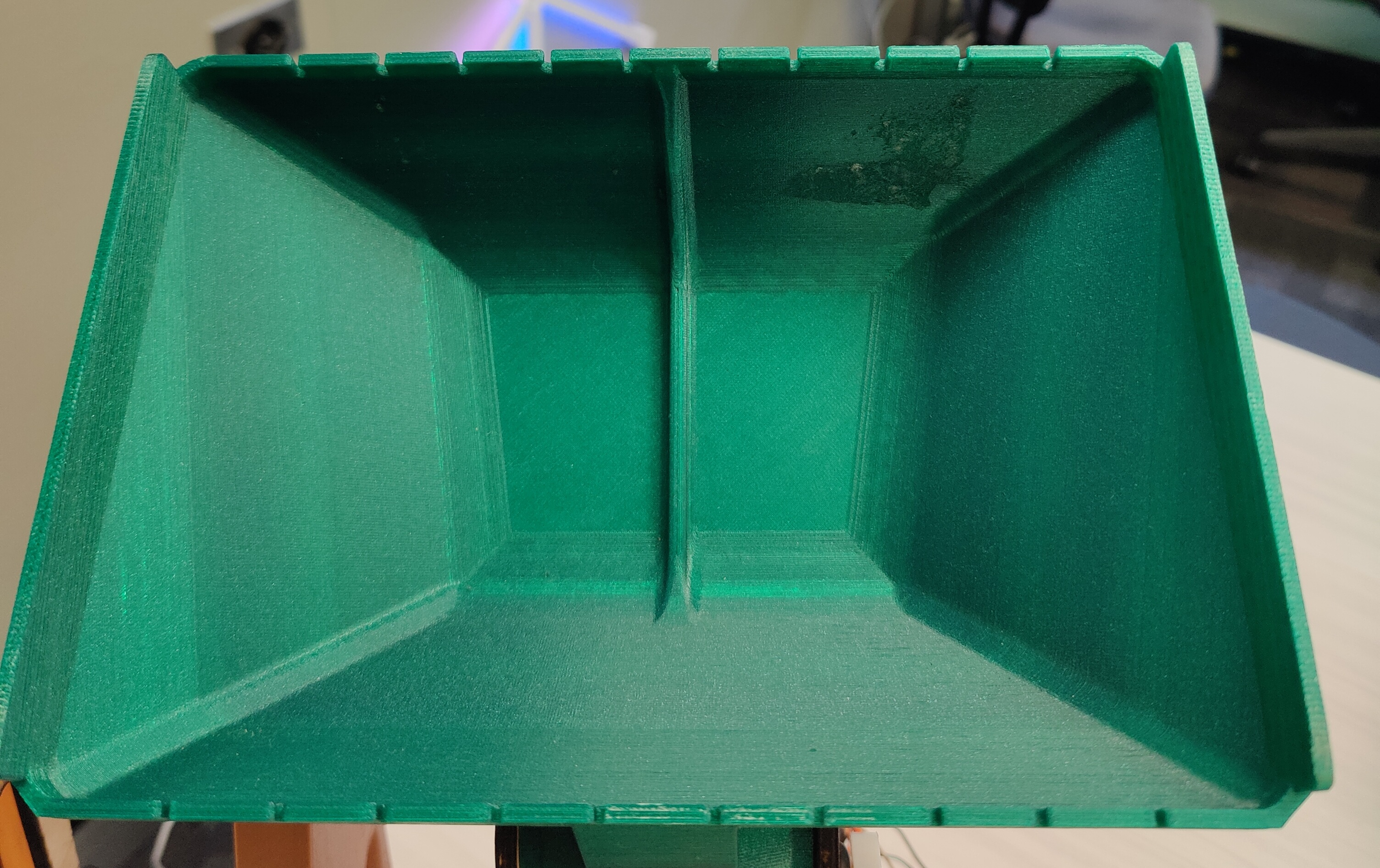
While the specialized wheel geometry excelled at stair-climbing, it compromised maneuverability on flat surfaces. To mitigate this, I designed an egg retrieval mechanism that eliminated the need for precision robot positioning. The concept I chose was inspired by a big-box store ball pit, using an array of elastic bands stretched over the opening of a large basket. This design could reliably pick up an egg over an area of 225x150 mm and retain it safely as the robot descended the stairs.